现代汽车通过网联化和智能化,已经不再是人类简单的代步工具,开始向解放人、理解人、不断满足人的人性化方向发展。智能网联是全球汽车技术发展中炙手可热的“主流”。智能网联汽车(Intelligent Connected Vehicle,ICV)是指搭载先进的车载传感器、控制器、执行器等装置,融合现代通信与网络技术,实现车与X(人、车、路、后台等)智能信息交换共享,以实现复杂的环境感知、智能决策、协同控制和执行等功能。智能网联在重新定义汽车的同时,也将改写汽车保险的面貌和未来。
表1 智能驾驶分级定义比较
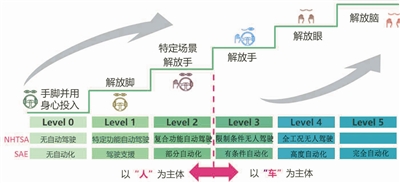
智能网联的使命:最终由汽车逐步接管人类驾驶
据世界卫生组织(WHO)发布的《道路安全全球现状报告》称,“道路交通伤亡已取代自杀成为‘伤害死亡’的首要原因。而交通事故发生的原因中93%来自于人为因素,其中80%是因为事发前3秒钟的“走神”造成的。汽车驾驶员在碰撞危险发生前若有1秒的“预警”时间,将可避免90%的事故发生;若有2秒“预警”时间,事故发生概率几乎可降为0。交通事故实践在不断证明,人脑是难以记忆和处理短而即逝的信息的。德国科学家研究结果显示,39%的驾驶员不能在碰撞事故前启动制动装置,40%的驾驶员不能有效控制制动装置。
智能网联的使命就是依托网联技术和信息共享,模拟人的大脑进行场景决策与车辆即时控制,实现人与技术的高超融合,克服人类汽车驾驶事故发生的“宿命”,最终走进汽车行驶的零碰撞时代,消灭交通事故及人员伤亡。智能网联汽车是在整个智能交通系统中的核心角色和重要组成,是由数据感知层、网络层、应用层等多层技术、多类技术元素协同共存的复杂系统。其在技术的发展集中体现在汽车自动驾驶的功能层级和技术迭代上。为此,主要汽车生产国均制定发布了自动驾驶分级标准,如美国的高速交通安全管理局(NHTSA)、中国汽车工业协会(CAAM)分别将自动驾驶分为5级,美国汽车工程师协会(SAE)分为6级。自动驾驶技术进阶过程,实际上是传感器配置与网联、算法的技术攻关过程,也是汽车逐步接管驾驶权的过程。为了适应这个重大改变,联合国修改了《维也纳道路交通公约》,不再要求驾驶员时刻掌握车辆控制权,认可自动驾驶技术对驾驶员的权限覆盖和接管。
全球自动驾驶技术L0、L1阶段技术较为成熟,L2阶段技术已经完成了大量的测试和验证,处于由 L2进入 L3的关键阶段,国际知名品牌的汽车企业已经开始量产L2级别车辆。一些互联网科技公司如谷歌直接跳过L3进入L4的研发。目前的智能网联技术研发,融合了高精度地图技术和环境信息,积极引入了无时滞和延迟的高速传输5G技术,采集海量的行车适用场景,依靠深度学习等大数据算法,急速推进自动驾驶的“升级”。
智能网联的新风险
当然,这一理想在技术实现上也为时尚早,真正的无人驾驶车辆仅仅是样品或试验品,还没有真正实现产品化。智能驾驶的真正落地应用,还须突破现实的技术应用瓶颈,比如高精度地图的开放和应用、数据高速与安全传输、网联通讯标准的建立和发布,其中任何一方面的突破,都将是一个漫长的过程。
与此同时,新技术也将带来新风险,且不可忽视。智能网联汽车是汽车与外部车辆、基础设施融合的网络系统,通过汽车上的十几种传感器,可以实现汽车与汽车(V2V)之间、汽车与道路基础设施环境(V2I)之间的实时通讯。到2020年,全球销售的汽车有2/3具备某种形式的“网联”。汽车因智能网联技术的引入更加像个IT产品,目前汽车的软件系统复杂度已经远超过F35战斗机、WINDOWS7视窗操作系统和FACEBOOK, 将成为车辆风险的重要根源和诱发因素。这种IT风险主要表现在四个方面:
(1)信息安全风险。智能网联汽车是由多个数字化系统集成的复杂系统,会有众多开发商和硬件提供商接入,任何一个环节都将可能成为“软肋与漏洞”。比如目前车载系统软件代码已经超过1亿行,根据CMM模型推测,汽车与生俱来的软件漏斗就有32000个。黑客或其他恶意者可通过汽车手机APP、云平台维护系统或第三方设备入侵汽车系统,获得汽车控制权,进入电子控制单元,直接控制汽车传感器、发动机控制器和其他汽车功能,如远程解锁或锁闭车门,刹车制动、提速、降速直至终止发动机运转,切断动力电源,控制车门车窗。还会引发一系列汽车攻击,包括汽车盗窃、汽车远程劫持、恐吓破坏秩序甚至谋杀,不排除造成大规模车辆被控制,波及国家和社会安全。
(2)数据传输与安全保护风险。智能驾驶汽车需要配置大量传感器,每秒钟可生成1GB的数据,利用这些数据形成高精准度地图信息,确定行驶方向和速度。快速普及的4G网络可以提供较高速度的带宽传输,但一旦基站缺失或基站附近连接过多,数据传输延迟也会明显增大,时延产生的后果将极为严重,一个刹车信号晚发出半秒将可能造成严重的、难以预知的事故。智能网联在数据开放的过程中,也会产生数据安全和个人私隐保护的问题。
(3)功能使用风险。为提升驾驶体验,智能网联汽车将融入越来越多的人车交互、娱乐、通信、巡航、自助泊车、车载电话等便捷功能。但科技化同步加剧了驾驶员注意力的分散,而注意力不集中恰恰是交通事故特别是重大交通事故的发生原因。特别在L3、L4级自动驾驶的“人机共驾”模式下,人与车辆的驾驶权交接是一项技术难题,如果操作不熟练、对辅助功能不熟悉、注意力不集中,人机切换过程反而极易发生交通事故。
(4)算法的安全与局限。随着智能驾驶技术迭代和功能进阶,需要采集、计算和承接的数据将呈现几何级数增长,以支撑算法的科学性和有效性。在智能驾驶实际测试环境中的算法优化,是极为有限的,即便是在测试环境中上百公里不出事故,不代表真实行驶环境中无偏差。算法在应对复杂情形的现实场景中,可能一直处于相对“缺陷”的状况,因此算法的优化与安全目前是有瓶颈的。同时算法还面临着道德伦理的局限性。如遇上不可避免的交通事故,算法如何在交通法规遵循与避免事故上进行选择,如何在老人与儿童及各种人物间予以选择等等。
如何应对智能网联时代的车险变革
在未来,智能驾驶在逐步消灭碰撞事故的同时,会不会使现有的汽车保险产品消亡?这是所有国家保险业急于探究的问题。从理论逻辑上分析,智能驾驶以零碰撞为目标,将直接降低碰撞率以及汽车保险的出险率,车主投保积极性将下降,保费应当降低,甚至遭遇“滑铁卢”。据毕马威KPMG预测,到2040年,全球车险市场将可能因智能驾驶大幅缩水达60%。
理论上的远期展望与现实中的市场发展往往还有很大的距离。由于智能驾驶系统和车主不正当操作导致的事故风险,保险公司客观上承担了这部分风险。由于大量引入电子设备、软件系统,零部件和系统成本高,智能汽车维修保养成本远高于传统车辆,反倒可能推高汽车维修与事故赔付率。当前,智能驾驶汽车国内保有量小、存在事故责任关系不清晰、责任认定难等问题,若无至少三年行业数据回溯和索赔经验,保险公司将难以进行费率合理厘定与调整。
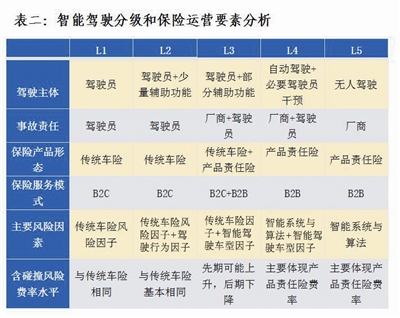
智能驾驶阶段的演进过程,是智能驾驶系统责任占比加重、驾驶员责任释放的过程,这从根本上改变了车辆事故责任结构与关系,事故责任可能是驾驶员(多为部分自动驾驶)、系统开发商、地图服务商、通信服务商、整车厂。但对事故还原并解析事故直接、间接原因,确定责任赔偿比例,是极为复杂的技术问题和法律问题,短期间内,保险公司无法组织和推动事故成因鉴定,并对相关责任方进行追偿。这种复杂而渐进的责任关系变化,对保险公司的业务、技术和法律能力是个巨大的挑战。要求保险公司的服务由B2C变成B2B,由车主投保传统汽车保险改变为汽车制造商投保质量责任保险。整个变化并不是单一险种的降低或变化,而是整个车辆相关风险池的不断变化,需要保险公司在运营模式予以调整。
为此,保险业必须未雨绸缪,密切关注智能驾驶车辆的风险规律,服务国家智能网联汽车产业和消费发展。一是在产品层面积极推动产品创新。基于人工驾驶、辅助驾驶、自动驾驶等情形,定义驾驶状态的起始标准,进一步明确保险公司相应的赔偿责任、除外责任、赔偿标准及责任追偿等条款内容。加强对智能驾驶车辆质量责任风险的研究,包括相关的法律问题、风险变化、责任认定等,在原有汽车保险产品中独立出汽车产品质量责任产品。加强与汽车企业的深度合作,就汽车相关电池、车载系统ADAS单独制定产品责任人保险示范条款,并在原有传统产品中剔除相关责任,逐步构建传统汽车保险与汽车产品质量责任保险两套条款与费率体系。
二是在服务层面推进事故处理机制建设。建立完善智能驾驶场景下,交通事故处置、责任赔偿与损失追偿的机制,由交通管理和保险监管部门达成共识,并予以公告、纳入相关法规。保险业应与汽车技术研究与鉴定相关机构开展事故鉴定研究与合作,以提高对电动化、智能化车辆事故责任和损失认定的科学性、权威性和公允性。保险公司要发挥事故善后事宜处理的核心和纽带,按照国际惯例,无论驾驶系统故障是否为直接或间接的事故责任,受损方依据保险合同可以直接向保险公司索赔。保险公司先行赔付后,若判定事故原因为智能驾驶系统故障,保险公司可采取代位求偿的方式代投保人向汽车生产厂商索偿。同步建立完善事故车辆救援、查勘、定损、维修工时、零部件等服务标准和流程,有效提升服务效率、合理控制理赔成本。
(作者单位:中国保险信息技术管理有限公司)